
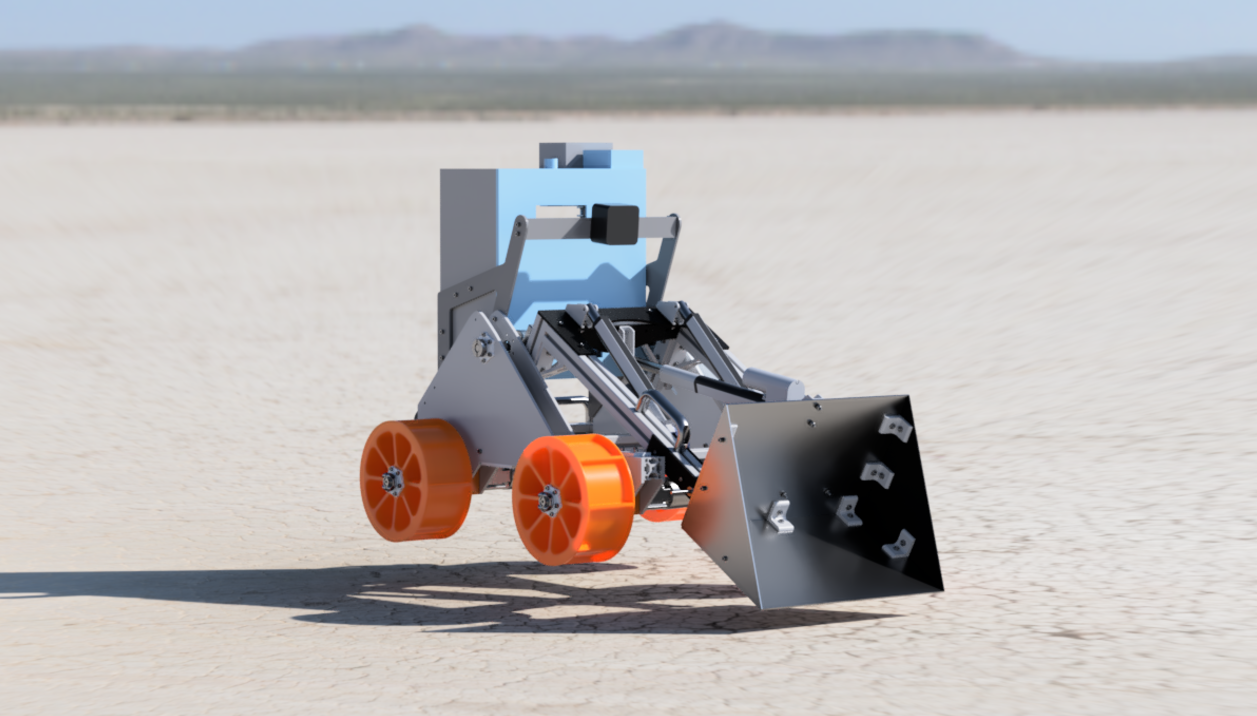
Lunabotics is a year-long competition where university-level teams compete to design, build, and operate robots that conduct operations on a simulated lunar surface. Teams experience the full project life cycle while employing systems engineering principles to meet competition deadlines throughout the year.



Team leadership members help facilitate team meetings, and
serve as team ambassadors when communicating with staff at
the University of Tennessee and external partners. Our
leadership team is made up of the following members:
President — Christopher Canaday
Vice President — James Watts
Treasurer — Uddish Sood
Safety Officer — Megan Hurley
Mechanical Lead — Justin Zondor
Controls Lead — Connor Gannaway
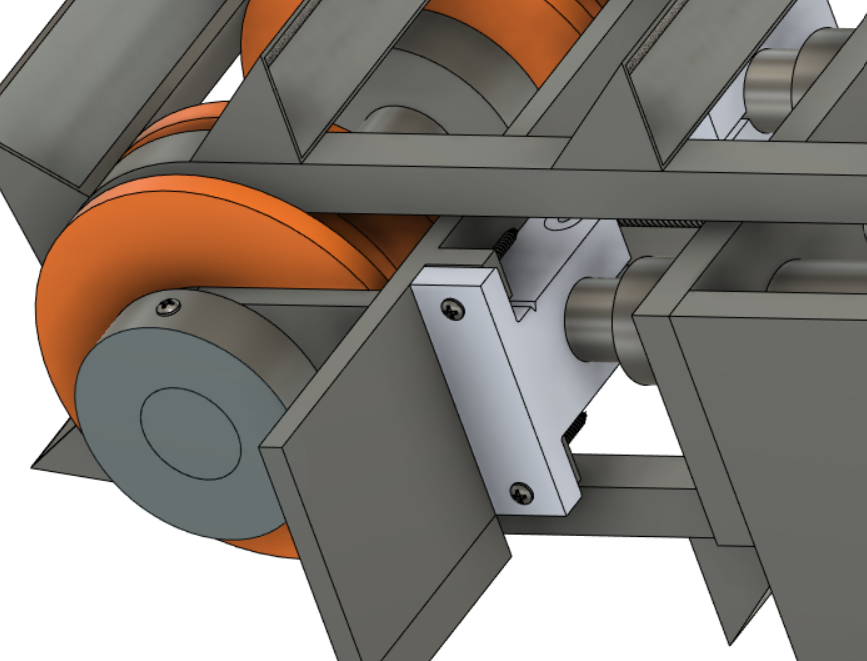
Every bolt, angle, and measurement is designed using CAD by the Mechanical Design Team. The team iterates through the design process, from preliminary design review to critical design review, working to design the best solution for the robot's task with consideration to budget, parts, and feasibility. The design team splits itself into subteams that focus on specific functions of the robot during development, and spearheads robot fabrication in the spring with help from the rest of the team.

The the Business Team is the backbone of our financial and community outreach endeavors. Tasked with managing budgets and procurement, we ensure the organization remains fiscally sound. Our passion extends to promoting STEM among the youth, facilitated through well-organized outreach events. On the fundraising front, we harness partnerships, pursue grants, and drive merchandise sales. In the digital realm, we engage our audience through social media channels and online sales, ensuring our mission's message resonates.
The Control Systems team is responsible for all of the
code required for the different robot systems, as well as
the electrical design. The code is split into a client
application, as well as server and embedded systems
communicating over TCP.
We make use of the following
languages and tools:

Tennessee Lunabotics supports two subteams competing in
other NASA Artemis student competitions, the Micro-g
Neutral Buoyancy Experiment Design Teams (Micro-g NExT)
Challenge and the Breakthrough, Innovative, and
Game-changing (BIG) Idea Challenge. These teams propose
and develop technologies addressing key pain points in
NASA’s human exploration programs.
Micro-g NExT Leadership Team:
Tennessee Lunabotics was founded in 2021 to compete in NASA's annual Lunabotics Robotic Mining Competition. The team is interdisciplinary in nature, with members in all disciplines of engineering as well as in business and the natural sciences.

The ultimate goal of the team is to enhance the university-level education of our members by teaching practical skills to solve a truly difficult engineering problem. Members gain practical experience in areas such as hardware and software design, project management, fundraising, outreach, and soft skills such as collaboration and presentation skills, all usable in their careers. Our members routinely get internships & offers from NASA, DOD, leading tech companies, and defense contractors.
There are many ways to become an active member of Tennessee
Lunabotics! You can either join our team's
Discord, send us an email, or stop by one of our weekly General Body
Meetings Mondays at 6 P.M. in the Kao ICS!
If you have any questions, reach out at: [email protected]